ALL PROJECTS



engineering Completed
Shell Eco-Marathon — 2nd Place
Autonomous Team Leader · 2025 · 8 months
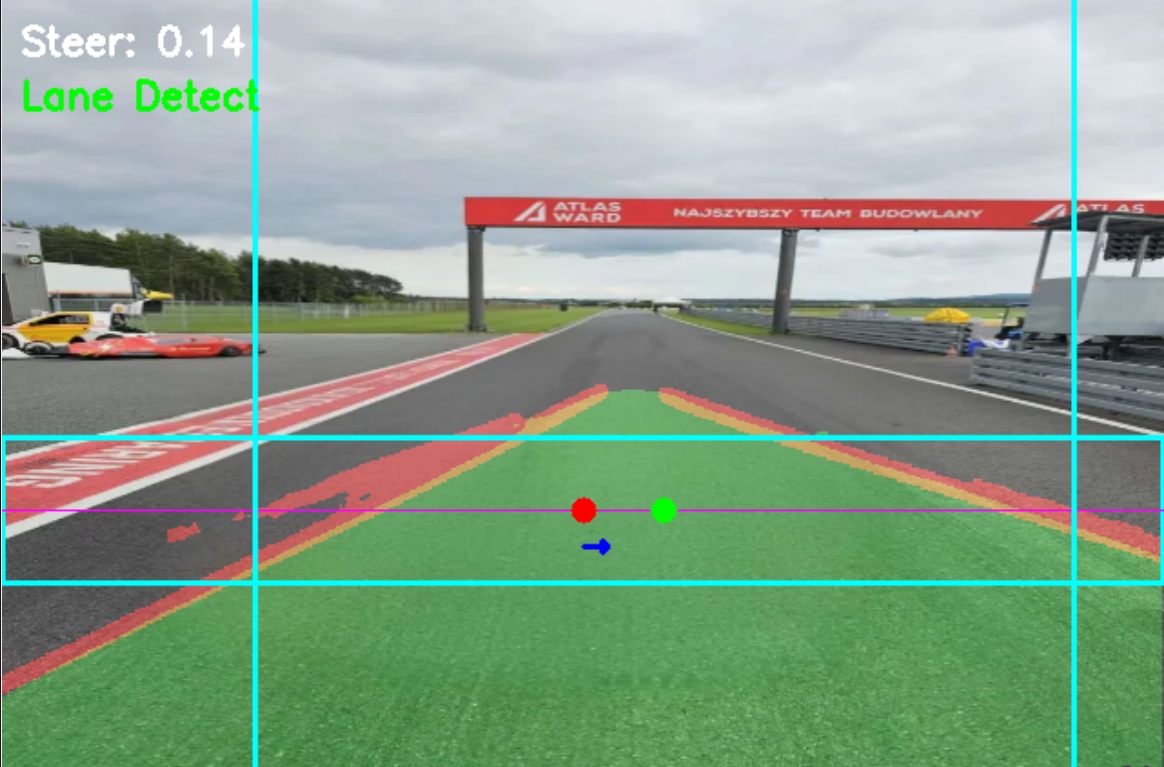
Led the autonomous systems team for UDST's Urban Concept vehicle at Shell Eco-Marathon Poland 2025. The system integrates LiDAR, ultrasonic sensors, and computer vision on a JETSON AGX platform running ROS2. Developed algorithms for lane following, obstacle detection and avoidance, and precision autonomous parking. Successfully competed against international teams to secure 2nd place in the autonomous category.
PythonC++ROS2LiDARJETSON AGX
Highlights
- → 2nd place at Shell Eco-Marathon Poland 2025
- → Full autonomous navigation competing internationally
- → LiDAR + ultrasonic sensor fusion with ±5cm accuracy
- → Real-time obstacle detection and avoidance
- → Precision autonomous parking system
Gallery